
Arm, eye, or head movements, neurologically seen, are very complex processes. In order for a movement to proceed flowingly, the brain must constantly compare incoming information with outgoing commands. The messages of the peripheral sensors (receptors are located in the joint capsules, muscle and neurotendinous spindles display fine receptors and deliver constant information to the central nervous system) forward information about the extremities’ position, muscle and neurotendinous tension. They let perceive if the next planned movement is even possible. In a constant feedback process, commands from the central nervous system go back to the periphery, that is, to the hand or eye.
The execution of examinations in early and even in later phases of the space flight led to new information about the state of the cosmonauts’ movement control system. This information is important for the understanding of the strategy and tactic of coordination structure’s strategy and the sensory support of movements during adaptation in weightlessness, and the chronological process of the emerging motor disruptions.
Objectives
Weightlessness changes the messages of the sensor systems to the brain. Additionally, the information flow decreases especially drastically in the equilibrium organ due to missing gravity. Due to the fact that the muscular activity is small, less information also comes from the muscles, joints and bands. Even the skin send less information to the brain, because the soles and buttocks are barely stimulated, clothing nearly doesn’t fit to the body. Only the eyes and ears are strongly busy similar when on earth. They should have an important control function during the adaptation processes, even though, for example, the concepts of “above” and “below” have no meaning anymore in weightlessness.
The main goal of the MONIMIR experiment illustrates the examination of the motor control system’s state during a long-term flight, as well as a comprehensive examination of the role of visual, proprioceptive and vestibular afferencies for the clarification of their functions during the various execution phases of the motor program.
The concrete experiment tasks were the following:
- Examination of the kinematical and electro-physiological movement parameters of the eye, head and arm at a visual signal during a long-term flight;
- Examination of the kinematical and electro-physiological parameters of head and arm movements from the proprioceptive short-term memory;
- Examination of the influence of neck reflexes on spatial and kinematical parameters of arm movements;
- Examination of the spinal reflexes’ state.
Functionality, Measuring principle
The program of the MONIMIR experiment was identical for all three teams and consisted of the following tests:
- Coordination of precise eye and arm movements at visual signals for various visual control mechanisms of the arm movements;
- Coordination of precise eye, head and arm movements at visual signals;
- Head and arm movements from memory;
- Neck reflexes;
- Bio-mechanics of head movements;
- T-Reflex.
The cosmonaut had to execute head and arm movements on a pre-defined schema. These were recorded with a video-system and analysed on Earth. Three types of movements (arm, eyes, and head) were individually recorded and their coordination was compared with each other. A quick glance, a little after an arm movement, mostly led to a head movement. These reflexes come from the brainstem. Accurately defined optical signals that the cosmonaut had to the follow enabled standardised movements for all task stances. That is how the arm movements were registered with the help of an infrared pistol. He had to try and hit LED’s on a tablet (randomly controlled by the DATAMIR computer) that were currently lit. The pistol movements were recorded with the infrared camera system. The eye movements could be measured simultaneously with an electro-oculogram.
Two cameras registered the head movements. They followed the movements of infrared LED’s that were placed on the cosmonaut’s experiment helmet. The direction of the helmet/head could be followed with a helmet lamp that projected a light beam on the LED tablet.
For the examination of the interaction between short-term memory and movement, the cosmonaut had to lead a movement and finally try to repeat it with his eyes closed. Since he had no control through the eye, he was directed only on information that he received through the articular receptors.
The knee-jerk gave information about the activation grade of the sensorimotor system. It was measured with the help of a proven hammer blow. The knee-jerk in the muscles and joints of the upper cervical spine were determined with sensors. They showed the position and the movement of the head compared with the body. Changes in the messages from the cervical spine due to weightlessness can result in disruptions of the bodily motor function. Therefore the movements of the cervical spine are also recorded. Hence, messages from the brain system could be compared with messages from the remaining parts of the body.
Shared equipments of the Austrian payload
DATAMIR, AUDIMIR, OPTOVERT, MOTOMIR
Results
The examination of the influence of various types of visual feedback on the spatial-time parameter pre-programmed arm movements on visual signals
The experiment order for identical for all three teams and consisted of the following tests:
- Test A1: Precise arm movements without visual feedback (FVF).
- Test A2: Precise arm movements with partial visual feedback (the subject received visual information about the arm position after the conclusion of the movement) (TVF).
- Test A3: Precise arm movements with visual feedback (the cosmonaut received visual information about the arm position during the movement as well as at the end) (NVF).
The following could be shown in this experiment part:
- That the arbitrary precise movements in weightlessness are slowed down;
- That this slowdown is connected with no significant distortion of the movement structure;
- That in weightlessness, visual information is strongly involved during the planning and correction of movements but not in their execution.
The examination of the coordination of precise eye and head movement on visual signals
Based on the results, within the framework of AUSTROMIR project and with the goal of accurate research of the phenomena observed, the examination order was modified. The spatial arrangement was changed, and the amount and random distribution of the visual target points were increased. The examination mode for the examination of eye and head movements during the sight fixation reaction was the same as the one used by HM-16. However, as a result of high a failure and measuring errors rate during this experiment part, no centralized analysis could be carried out.
The influence of the head’s orientation on the spatial coordinates of the arm movements
The goal of this experiment was to examine the effect of different head and rump postures on arm movements under the influence of various gravity conditions (before, during and after long-term flights on the MIR space station). Target movements of the right arm in the horizontal plane on two visual stimuli were learned with open eyes and had to the reproduced with closed eyes. The head-to-rump posture varied in this reproduction phase. No detraction during the execution of target movements without visual control are to be expected in microgravity through changes of the sensory inputs of the vestibular (equilibrium organ) and the propioceptive (stimulus processing system) system.
The variation of the three independent variables, basically the influence of the visual system, the different gravity conditions and the various head positions clearly change the spatial as well as the metric parameters of the arm movement.
The head position relative to the rump seems to play an important role whilst coding the target position. Without visual feedback, the lengthy YAW or ROLL position of the head most probably disrupts the hypothetical body schema. Thus, a significant decline of the inner representation of the horizontal coordinates to the opposite side of the body occurs.
The effect is so much the stronger:
- The larger the disruption that is created through the extreme head position.
- The larger the cooperation of the muscles, the longer the head position is kept.
- The more remaining information that will be reduced. In weightlessness, the sensory cells of the inner ear cannot clearly assign the position of the body within the room. Therefore, the subject summons previous experience values, e.g. the feet are below and the head is above when standing up. Thus, in weightlessness, the stimulation of the neck receptors is misinterpreted as the decline of the whole body in direction of the head instead of a decline of the head to the body. Most probably, the movement plan of the arm from the brain is also interpreted differently.
Through the loss of background information, missing visual feedback and reduced information during the flight, reduced movement extents and speeds appear. The average speed in all head positions for all cosmonauts is constant during and after the flight. But relatively large systematic errors are found. They would have possibly corrected them if these would have been known.
The influence of weightlessness on the reproduction of various arm movements learned
The scientific question in this experiment was whether the target movements of the arm, one time learned only with propioceptives and another time learned with propioceptives and visual feedback, exhibit other spatial characteristics in weightless as compared with earth conditions.
The arm movements in a triangular pattern were learned by two different types:
- Learning of the stimulus pattern through passive arm movements carried out by a second person, and the subject having the eyes closed (learning through propioceptive control).
- Learning of the stimulus patter through active arm movements with the eyes open (learning through optic and propioceptive control). A test consists of two parts, the learn phase and the memory phase.
Parameters that define the triangle size are sampled out differently, depending whether they were learning actively or passively. For this experiment, active learning basically means the possibility of visual calibration that is decisive for the motor performance. Despite these optimal learning conditions, the difference to the test performances, which are exclusively learned through propioceptive information, is not big. An inner picture of the triangle helps the cosmonauts during reproduction. The magnitudes and lengths require calibration; the form replay is a cognitive performance. Even earlier experiments show that the form can be replayed better than the magnitude. The difference gravitational conditions have a significant influence, mostly on the spatial parameter of the triangle.
Summary
Based on the distinct changes of the information influence from the equilibrium apparatus and the body’s own receptors, as well as due to the changed bio-mechanical conditions, far-reaching changes in the sensor-motor control of bearing and movements are required. The MONIMIR experiment systemically examined the aspects of these adaptation performances. Summarized, they are:
- Visual control in weightlessness: Visual control has more significance for the spatial orientation and for the planning of movements.
- Vestibular-propioceptive control in weightless: Under Earth conditions, propioceptive and vestibular information regarding body position and movements are in unison. The gravity-related function components are omitted in weightlessness. The interpretation of space-related information must be changed. In the experiment it was shown that the change can be balanced through propioceptive reception. Movement control can only occur effectively through additional visual information.
- Movement kinematics: All arbitrary precise movements are slowed down in weightlessness, but it is not connected with any significant deformation of the movement structure. That is why an apparent change of the movement strategy is presented here.
Technical characteristics
The equipment MONIMIR consisted of the following units
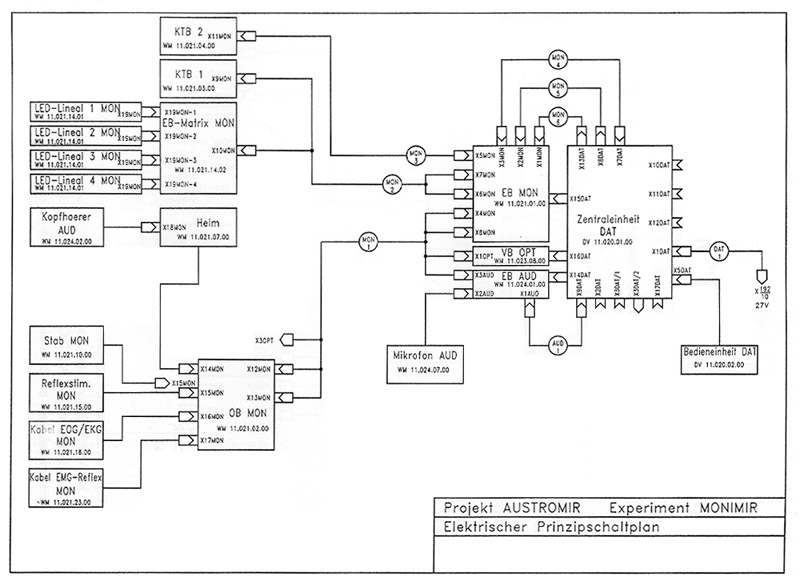
Electronic box with cables
This unit was installed in the central unit of the system DATAMIR, the connecting cables to DATAMIR MON4, MON5, MON6 were supplied allready mounted.
| Mass: | 2.0 kg |
| Dimensions: | 251 mm x 142 mm x 129 mm |
| Power input: | 20 W |
Aluminium container with additional- and reserve devices
- Operator box (OB MON) with the pre-amplifiers for the electro-physiological signals
- CCD – Video camera KTB1
- Fixing device for KTB1
- CCD – Video camera KTB2
- Fixing device for KTB2
- Helmet top with a show lamp and 5 twosomes of infrared diodes
- Headset as fixing for the fixing device on the head of the subject
- Light-emitting diode array elektronic box (EB-Matrix MON)
- Reserve lamp helmet/beam
- Reserve fuses
| Mass: | 7.6 kg |
| Dimensions: | 545 mm x 360 mm x 150 mm |
Cloth bag 1 with equipment components
- Beamer with light and 5 Infrared LEDs
- Reflexstimulator
- LED matrix ruler (4 pieces) with each 7 LEDs
- LED matrix coverage (4 pieces) to compose a color coordinated matrix background
| Mass: | 5.7 kg |
| Dimensions: | 535 mm x 240 mm x 190 mm |
Cloth bag 2 with equipment components
- Cable MON1 (connection electronic box – operator box)
- Cable MON2 (connection electronic box – video camera KTB1)
- Cable MON3 (connection electronic box – video camera KTB2)
- Electrode cable EMG
- Electrode cable EOG/EKG
- Electrode cable EMG for reflex stimulation
- Set of electrodes (100 pieces)
- Set of cleaning tissues
- Set of fixation sleeves for the electrode cable (4 pieces)
- Shirts MONIMIR/MOTOMIR
- Belt to fix the operator box at the subject
- Belts to fix the subject (3 pieces)
| Mass: | 5.1 kg |
| Dimensions: | 510 mm x 235 mm x 170 mm |
Experimenters
Medicine:
Univ.-Prof. Dr. Franz Gerstenbrand (institute manager)
Univ.-Prof. Dr. Meinhard Berger (project manager)
Univ.-Prof. Dr. Serguei Mechtcheriakov
Dr. Silvia Lechner-Steinleitner
all: University Clinic for Neurology, Innsbruck
Prof. Dr. Inessa Benediktina Koslovskaja
A. Sokolov
B. Babaev
all: IMBP (Institute for Biomedical Problems), Moscow